Картограмма видимости
В системе IndorCAD реализована возможность производить оценку видимости с помощью 3D-моделирования. Для такого расчёта необходима сформированная цифровая модель местности, включающая в себя трёхмерную модель поверхности дороги, а также модели объектов, расположенных на ней (здания, растительность, дорожные знаки, рекламные щиты, шумозащитные экраны, автобусные павильоны и т.д.).
Построение картограммы
При построении картограммы видимости учитывается текущий вид проекта в 3D, поэтому перед расчётом картограммы его необходимо должным образом настроить. Обязательно должно быть включено отображение триангуляции проектной поверхности дороги, существующей поверхности, а также отображение объектов, расположенных вблизи проезжей части и потенциально влияющих на видимость: дорожных знаков, зданий, растительности, шумозащитных экранов, трёхмерных объектов (таких как надземные пешеходные переходы, автобусные павильоны и пр.). Видимость объектов, которые не должны влиять на расчёт (например, вспомогательных поверхностей), следует отключить.
Для расчёта картограммы нажмите кнопку Проект > Картограммы видимости. В выпадающем списке выберите трассу или несколько трасс, по которым должна быть рассчитана картограмма.
После построения картограммы соответствующий объект появляется в дереве проекта. Картограмма состоит из двух частей: видимости препятствия высотой 0,2 м и видимости встречного автомобиля высотой 1,2 м.

Фактическая видимость обозначается на картограмме различными цветами:
-
зелёный — видимость обеспечена;
-
жёлтый — видимость обеспечена недостаточно;
-
красный — видимость не обеспечена.
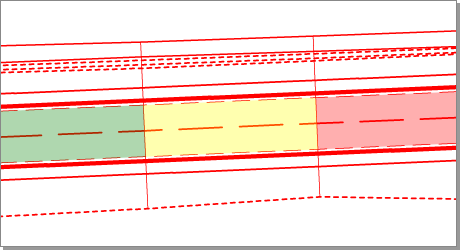
Распределение участков происходит следующим образом: от каждого поперечного профиля рассчитывается видимость препятствия и встречного автомобиля исходя из расчётной скорости. Таким образом, каждый цветовой участок сигнализирует о том, обеспечивается ли необходимое расстояние видимости при заданной расчётной скорости из каждого поперечного профиля этого участка. Красные участки показывают, что при нахождении на этих поперечниках заданное значение видимости не обеспечивается.
Параметры расчёта картограммы
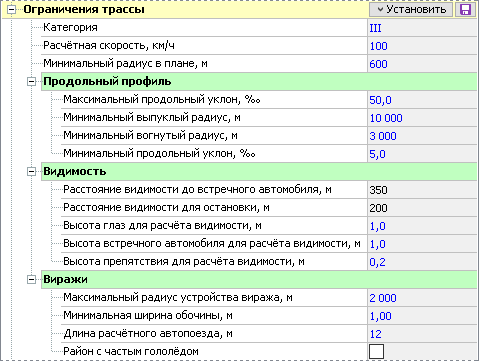
Картограмма видимости формируется для каждой полосы движения вдоль всей трассы в прямом и обратном направлениях. При построении картограммы учитывается несколько параметров, заданных в ограничениях трассы: расчётная скорость, на основе которой определяется расстояние видимости до встречного автомобиля и препятствия, а также высота глаз для расчёта видимости.
Используемые расчётные параметры можно увидеть в свойствах картограммы видимости препятствия и встречного автомобиля.
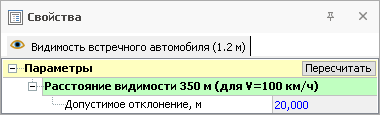
Параметр Допустимое отклонение используется при расчёте «жёлтых» зон картограммы, где видимость обеспечена не полностью.
Пересчёт картограммы
После изменений, внесённых в трассу или 3D-сцену, картограмму видимости следует пересчитать для получения актуальных данных. В свойствах видимости встречного автомобиля и видимости препятствия для этого предназначена кнопка Пересчитать.